Začínáme - Windows
Instalace VSCode rozšíření
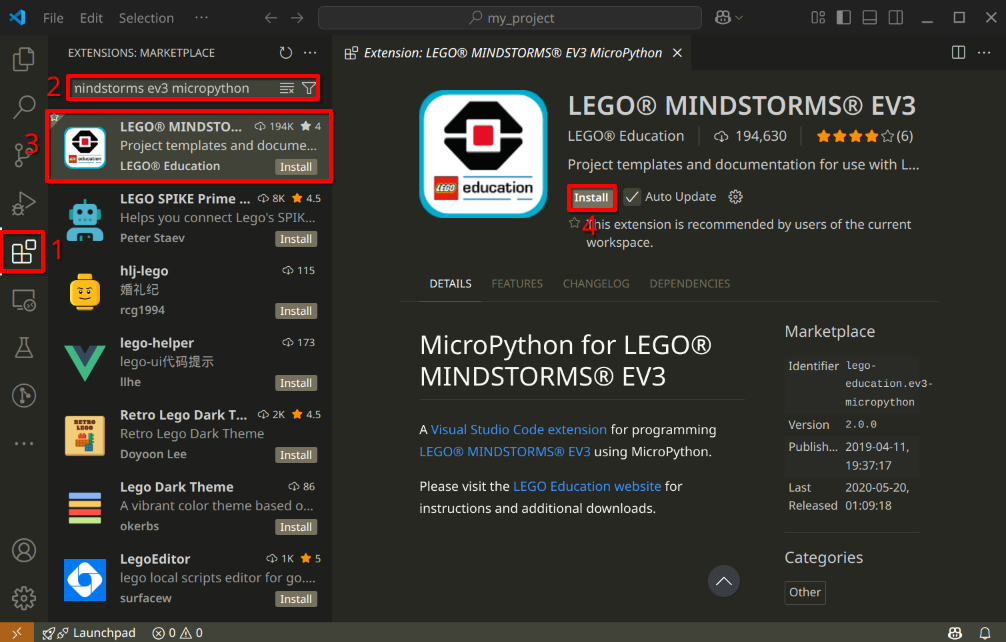
- V levé postranní liště klikněte na ikonku rozšíření
- Do vyhledávacího pole napište lego mindstorms ev3 micropython
- Klikněte na LEGO® MINDSTORMS® EV3 MicroPython, měl by to být první výsledek
- Klikněte na tlačítko Install
Vytvoření projektu
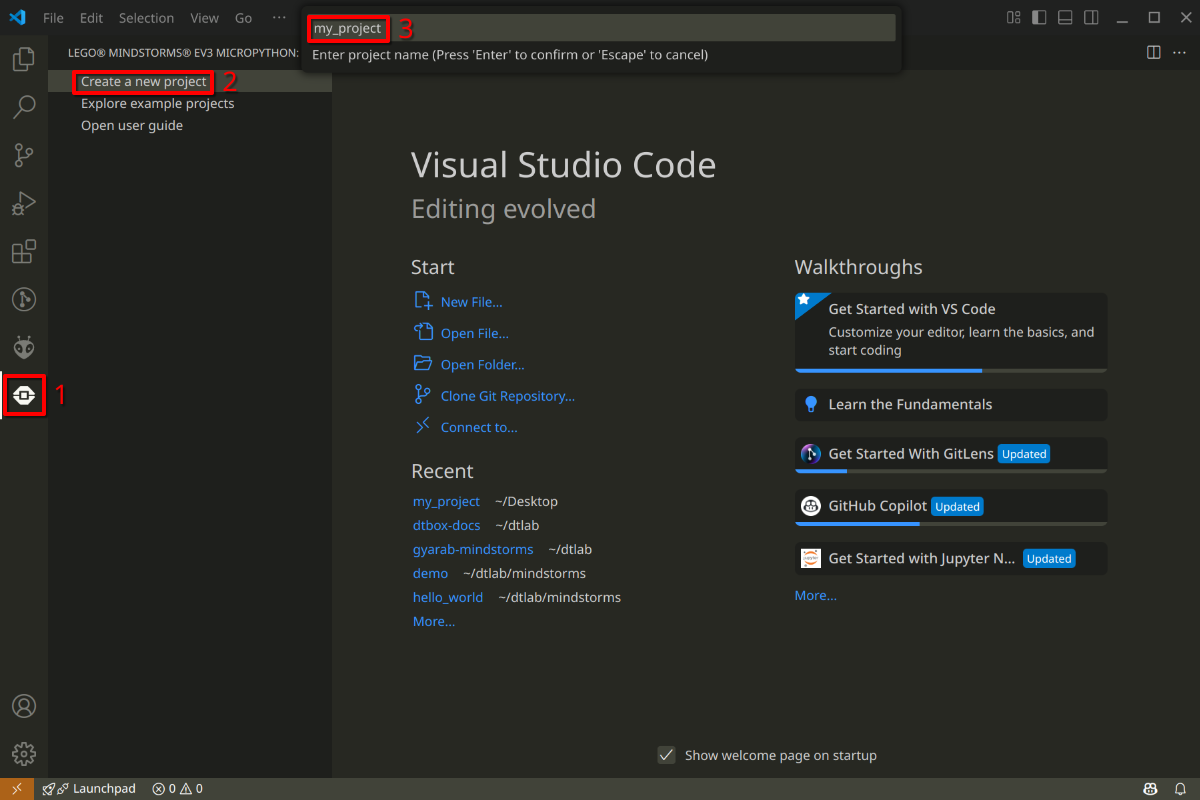
- V levé postranní liště (tam, kde jste přidávali rozšíření) klikněte na ikonku Lego Mindstorms
- Vlevo se otevře nový panel, klikněte na Create a new project
- Nahoře uprostřed obrazovky se zobrazí dialog, zadejte do něj jméno projektu (př. my_project) a stiskněte enter. Pod tímto názvem později naleznete váš projekt v robotovi.
- Otevře se okno s výběrem místa pro uložení projektu. Pro jednoduchost můžete uložit projekt na plochu.

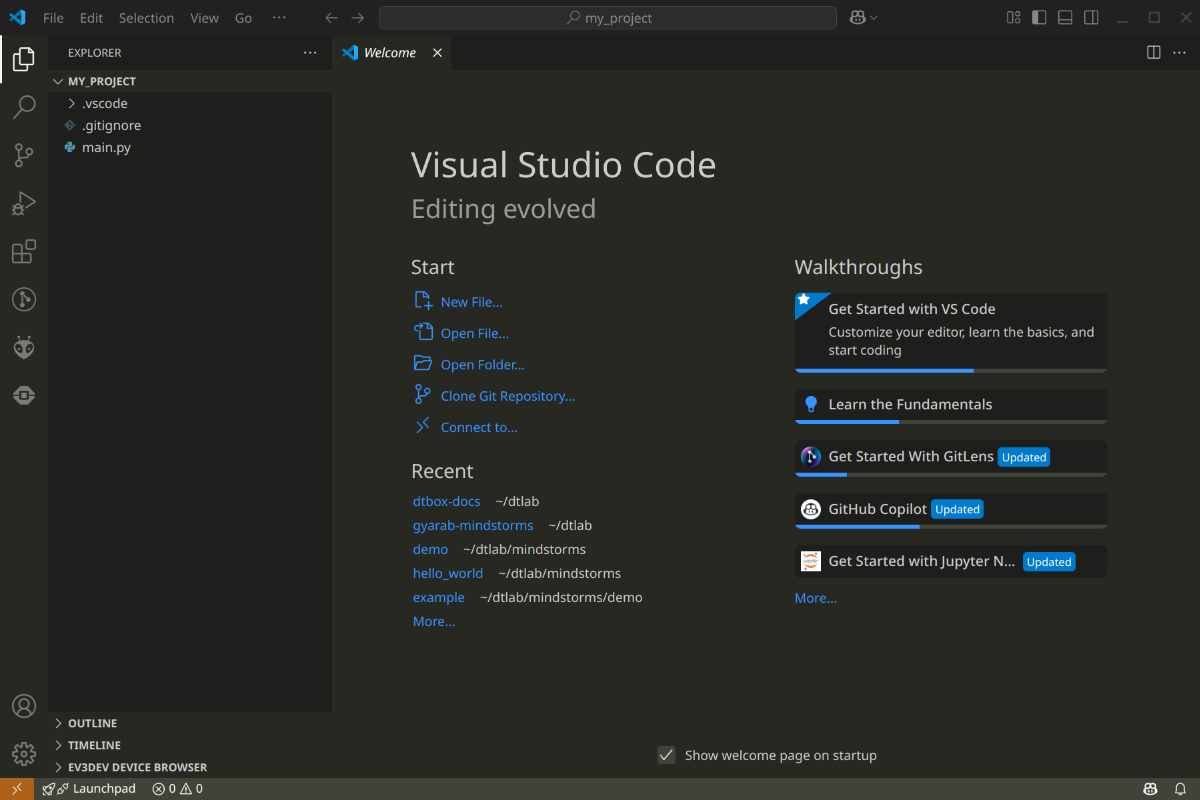
Pokud se všechno povedlo, otevře se okno s nově vytvořeným projektem. Mělo by vypadat zhruba takhle:
Připojení robota
Pozor
Předtím, něž se robota pokusíte připojit se ujistěte, že:
- Robot je zapnutý
- Robot je připjený kabelem
- Kabel je připojený k počítači
- Ve VSCode klikněte v levém dolním rohu na záložku EV3DEV DEVICE BROWSER
- V této záložce klikněte na Click here to connect to a device
- V horní části se objeví dialog, ve kterém se zobrazí dostupná zařízení. Pokud vidíte více než jedno, vyberte některé z nich. Pokud nevidíte žádné zařízení, přihlaste se o pomoc.

-
Počítač se pokusí k robotovi připojit. Pokud se vše povede, v záložce EV3DEV DEVICE BROWSER se objeví nové zařízení se zeleným kolečkem.

Pokud se připojení nezdaří, bude kolečko červené. Pokud jste v předchozím kroku měli v nabídce víc než jedno zařízení, zkuste se připojit k jinému. Klikněte pravým tlačítkem na zařízení v EV3DEV DEVICE BROWSER a zvolte Connect to a different device. Pokud ani to nefunguje nebo je k dispozici pouze jedno zařízení, přihlaste se o pomoc.

Nahrání prvního programu
V nově vytvořeném projektu by už měl být soubor main.py, který obsahuje jednoduchý program. Nahráním do robota můžeme ověřit, že všechno funguje.
- Otevřete ve VSCode soubor
main.py - Nahrajte ukázkový program do robota stisknutím klávesy F5 (nebo přes Run and Debug > Download and Run)
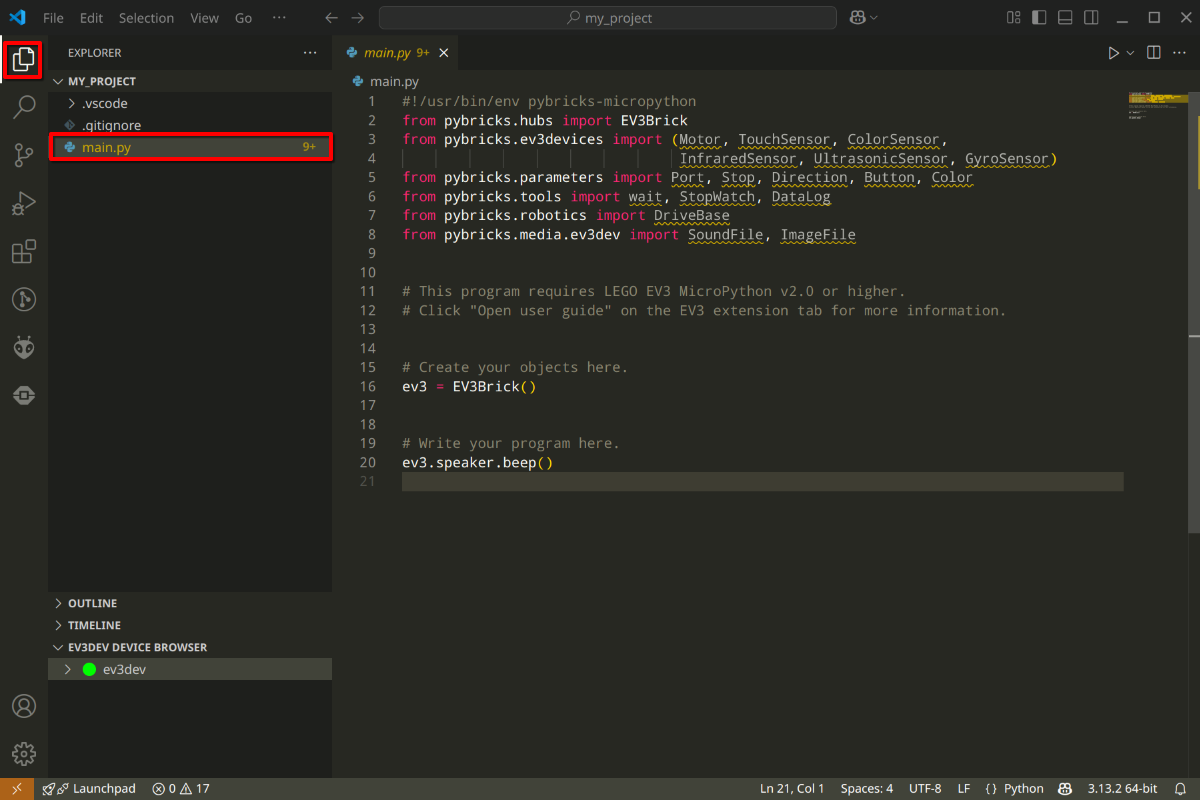
Pokud vše funguje správně, robot by měl krátce zapískat.